RA-L/ICRA 2020 - Guided Constrained Policy Optimization for Dynamic Quadrupedal Robot Locomotion Oxford Dynamic Robot Systems Group 4:59 4 years ago 1 391 Далее Скачать
[Presentation] Guided Constrained Policy Optimization for Dynamic Quadrupedal Robot Locomotion Oxford Dynamic Robot Systems Group 9:59 4 years ago 685 Далее Скачать
First Steps: Latent Space Control with Semantic Constraints for Quadruped Locomotion ORI - Oxford Robotics Institute 4:38 4 years ago 686 Далее Скачать
RA-L/ICRA 2020 - GaitMesh: controller-aware navigation meshes for legged locomotion planning Oxford Dynamic Robot Systems Group 2:27 4 years ago 795 Далее Скачать
RA-L - ICRA 2020: Gaussian Process Preintegration Cédric LE GENTIL 9:32 4 years ago 287 Далее Скачать
Manipulability optimization for multi-arm teleoperation - ICRA 2021 Presentation Computational Robotics Lab 11:07 3 years ago 224 Далее Скачать
[RA-L 21] Robust Trajectory Optimization over Uncertain Terrain with Stochastic Complementarity GaTech LIDAR Group 6:16 4 years ago 402 Далее Скачать
Robust Trajectory Optimization for Robot Locomotion over Uncertain Terrain - ICRA 2021 Luke Drnach 12:31 3 years ago 63 Далее Скачать
Maurice Fallon: Navigation Systems with Quadruped robots [ICRA 2020 WS - Legged Robots] Legged Robots 47:13 4 years ago 2 261 Далее Скачать
Quadrupedal Locomotion via Event-Based Predictive Control and QP-Based Virtual Constraints (Full) Kaveh Akbari Hamed 4:37 4 years ago 451 Далее Скачать
[Presentation] Receding-Horizon Perceptive Trajectory Optimization with Learned Initialization Oxford Dynamic Robot Systems Group 10:33 3 years ago 579 Далее Скачать
Reliable Trajectories for Dynamic Quadrupeds using Analytical Costs and Learned Initializations Oxford Dynamic Robot Systems Group 3:00 4 years ago 938 Далее Скачать
Manipulability optimization for multi-arm teleoperation - ICRA 2021 short version Computational Robotics Lab 2:40 3 years ago 196 Далее Скачать
Extracting Legged Locomotion Heuristics with Regularized Predictive Control - ICRA 2020 Gerardo Bledt 2:59 4 years ago 1 185 Далее Скачать
Imitation Learning with Additional Constraints on Motion Style (RA-L 2021) JSK Tendon Group / Kento Kawaharazuka 2:25 5 months ago 318 Далее Скачать
RLOC: Terrain-Aware Legged Locomotion using Reinforcement Learning and Optimal Control Oxford Dynamic Robot Systems Group 4:50 2 years ago 1 786 Далее Скачать
[ICRA 2020] The Soft-Landing Problem: Minimizing Foot Penetration Depth on Yielding Terrain Northwestern Robotics 10:00 4 years ago 1 511 Далее Скачать
ICRA 2020 - Preintegrated Velocity Bias Estimation to Overcome Nonlinearities in Legged Odometry Oxford Dynamic Robot Systems Group 2:58 5 years ago 801 Далее Скачать
Dynamical Systems for Adaptive Grasping, Navigation & CoManipulation with Humanoids (ICRA 2020 Talk) Nadia Figueroa 9:58 4 years ago 475 Далее Скачать
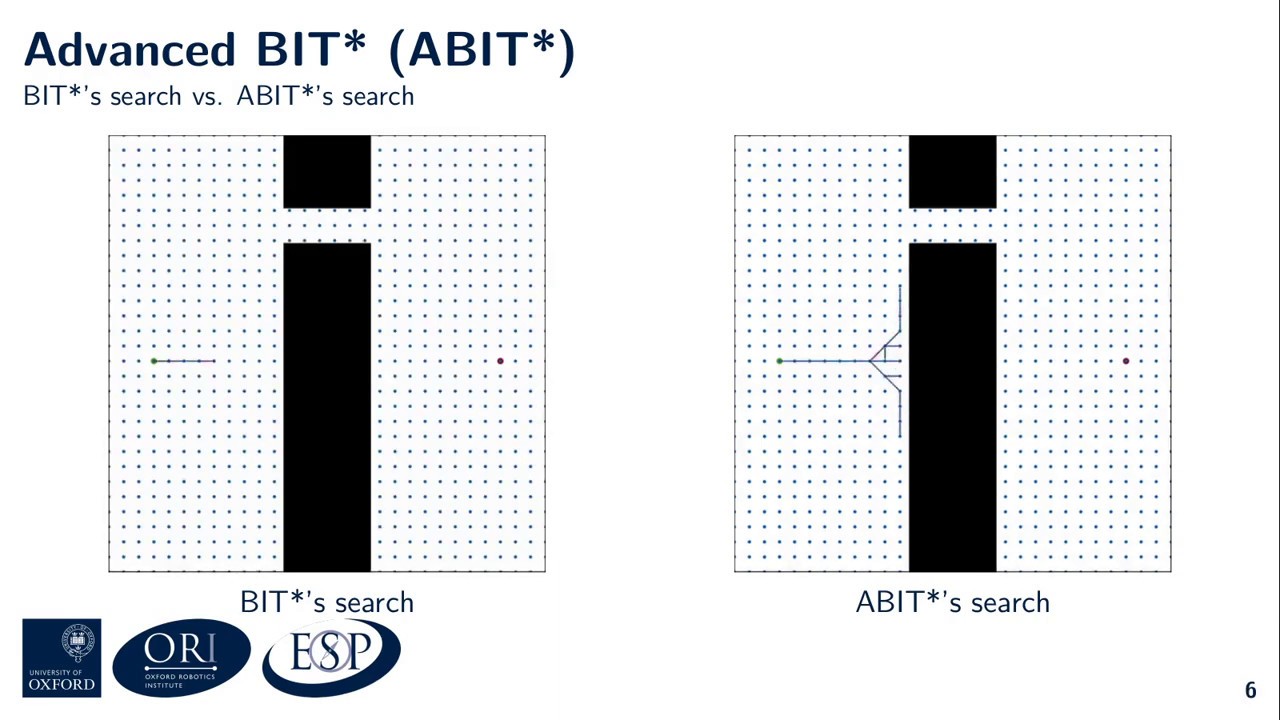
Advanced BIT* (ABIT*) - The Presentation - ICRA 2020 @ ORI Robotic ESP 9:29 4 years ago 1 437 Далее Скачать